Aerial robots or drones have a variety of applications, such as package delivery, search and rescue, surveillance, sports photography, and more. The aerial robot system operates in a closed-loop process from collecting sensor data, computing the scene mapping, and navigating the best trajectory path. Traditionally, off-the-shelf platforms (Intel NUC, Nvidia TX2, etc.) are used for onboard computing. In this project, we explore the optimal performance exploration for aerial robot platforms from top level system modeling, architecture exploration down to the energy efficient and reliable hardware design.
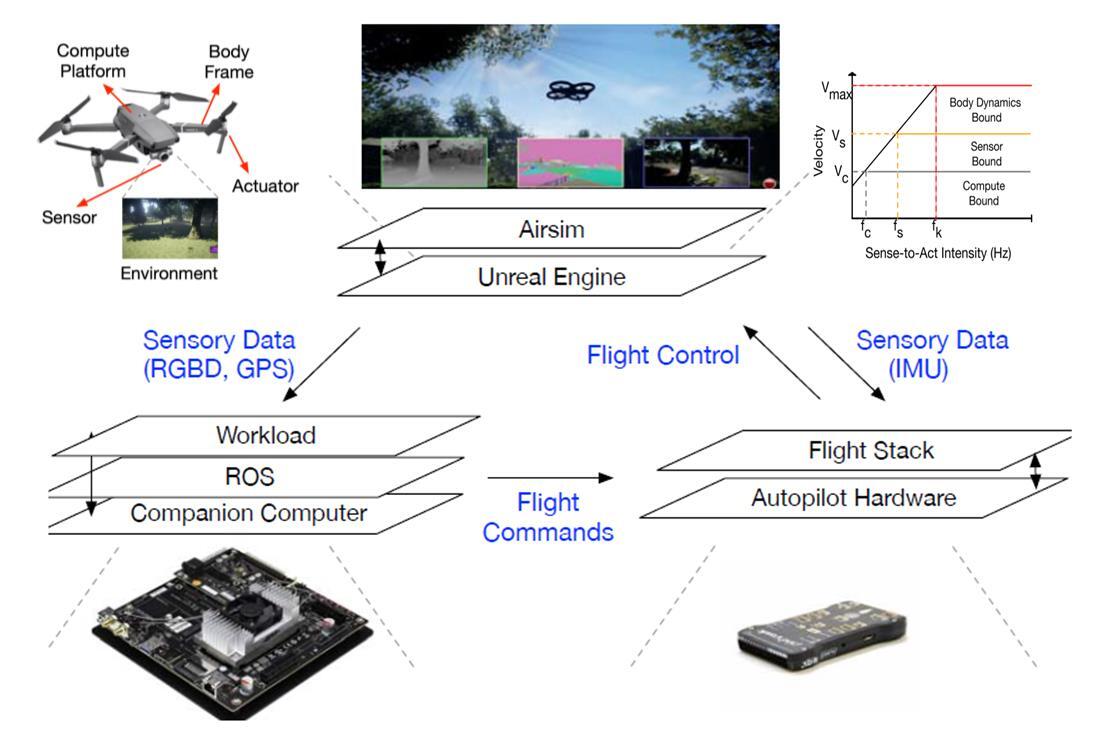
From the system perspective, the overall performance of the aerial robot/drone system is affected by the computing system's size, weight, and power. Therefore, there is a need for a systematic model to help architects understand the design tradeoffs. We develop a systematic roofline performance model to analyze the tradeoffs for a balanced computing system considering both its cyber and physical components. Besides, given the wide cyber-physical design space, we explore a push-button framework from a high-level specification to automatically co-design the control algorithms and hardware accelerators using Bayesian optimization.
The aerial drones also have to operate robustly in the highly dynamic environments. However, there is an insufficient understanding about how the external environment change or internal hardware faults impact the reliability of the systems. We develop an end-to-end fault injection and detection framework at system level for different applications. Through extensive reliability analysis, we explore fault resilient and energy efficient hardware design to improve the system performance and robustness.